

GB 36008-2018机器人安全碰撞力测量装置
| 品牌:GTE | 型号:Cobosafe | 类型:数字式 | ||||
| 测量范围:见详情 N | 测量精度:见详情 | 外形尺寸:见详情 mm | ||||
| 最大负荷值:见详情 | 推拉杆行程:见详情 | 重量:见详情 kg | ||||
| 适用范围:GB 36008-2018标准 |
 深圳市博纳德精密仪器有限公司
深圳市博纳德精密仪器有限公司
在人机协作中,没有保护措施可以防止人与机器人发生碰撞。为了确保人机协作 (HRC) 工作场所的安全,并尽可能降低受伤风险,ISO/TS 15066 标准定义了极限值。这些极限值是痛觉阈值,即感知到的压力感转变为痛觉的阈值。如果发生与机器人的碰撞或挤压,应遵守这些极限值。验证以及使用 CoboSafe 进行的测量是风险评估的一部分。
例如,优傲机器人的安全功能可用于设置*大有效力和速度。这确保协作机器人仅在定义的参数范围内运行。然后,可以使用 CoboSafe 测量和评估潜在危险。
规划人机协作 (HRC) 应用时,应注意以下几点:设计工作站和工具时应避免锋利的棱角,通过结构措施减少潜在的碰撞和挤压点,并确保机器人不在头部高度操作。所需的节拍时间/速度是多少?高速下,碰撞力通常过高,不利于协作操作。将使用哪些工件/工具?如果存在锋利的棱角、使用高温或化学品,或存在其他伤害风险,通常无法进行协作操作。
使用 CoboSafe,您可以根据 ISO/TS 15066 标准执行所需的力和压力测量。测量系统分为多个传感器,每个传感器采用不同的弹簧常数工作。由于不同的身体部位(例如手指和腹部)在碰撞中的表现不同,因此可以使用相应的弹簧常数进行模拟。这样,就可以根据 ISO/TS 15066 标准测量所有潜在的脆弱身体部位。
测量装置会记录施加的力随时间的变化。使用特殊的压力测量膜来确定压力。该膜会根据施加的压力改变颜色,然后可以进行扫描。 CoboSafe-Vision 软件将测量结果可视化并记录下来,以进行风险分析。
一、技术参数
| 高度 (mm) | 107 |
| 型号 | CBFS-10 |
| 弹簧常数 (N/mm) | 10 |
| 测量面积 (mm) | 80 |
| 测量范围 (N) | 20 - 300 |
| *大测量误差 (+/-%) | 3 |
| 测量精度 | typ.+/- 1 |
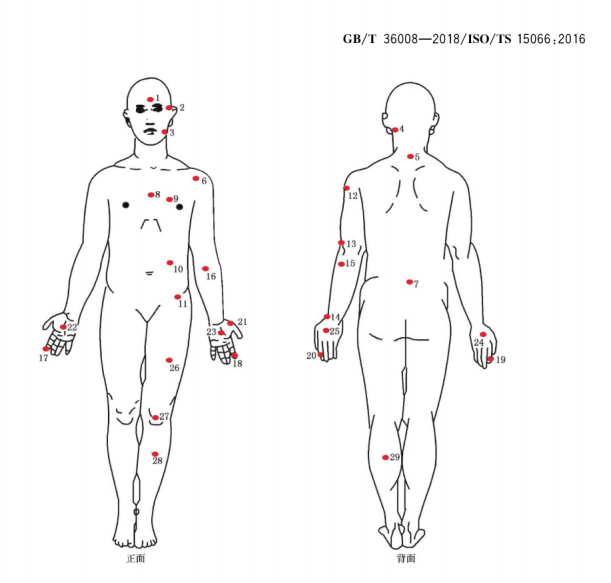
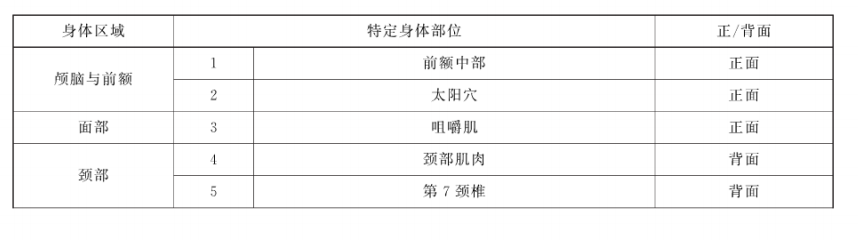
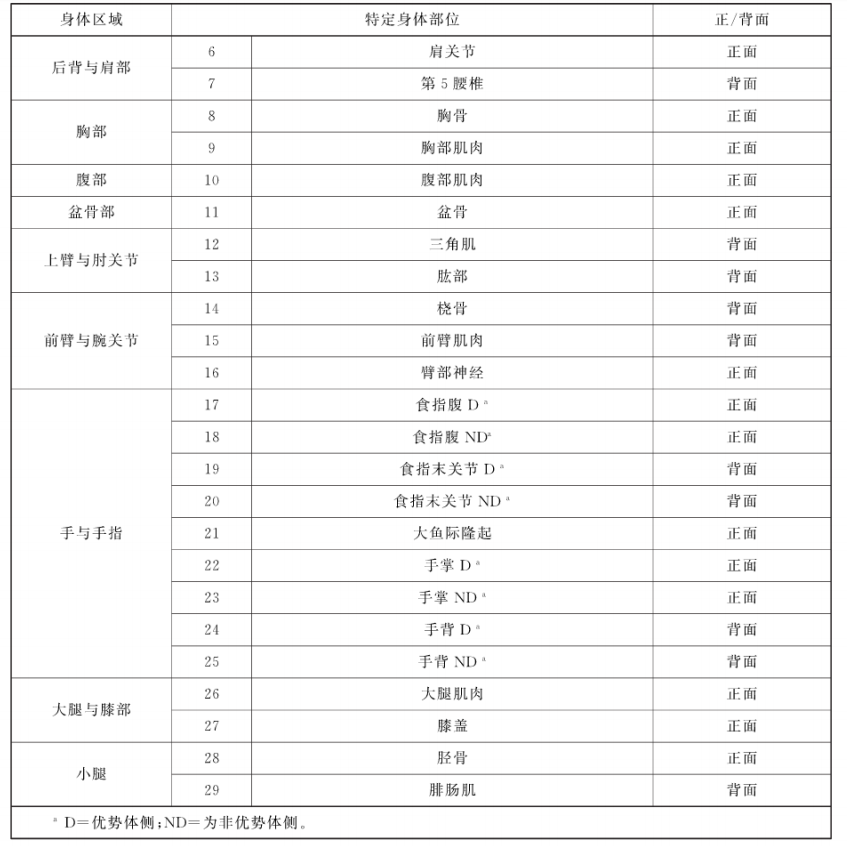
二、GB 36008-2018标准人物模型图
三、关于我们
公司生产IP防触电安规防护等级试验指、试验机、灯头量规通止规、插头插座量规、插座保护门、试验指针销、球压测试仪、弹簧冲击器、冷冻负载试验包、土壤水份传感器等等,还代理以色列OPHIR、德国WAZAU、德国GTE、德国FEMTO、英国MUNRO、英国RS、美国REGAN等进口品牌陶瓷砖/地板/道路摩擦系数测试仪、防滑检测仪、激光功率计/能量计、电流/电压/锁相放大器/光电接收器、试验仪器等等产品。